A. Pengertian Robot Line Follower
Robot adalah mesin hasil rakitan manusia yang bisa bekerja
tanpa mengenal lelah. Robot bersifat otomatis, yakni dapat melakukan berbagai
pekerjaan secara berulang-ulang. Mesin Robot dilengkapi dengan pengontrol (otomat)
yang berisi perintah-perintah yang harus dilakukan oleh robot.
Salah satu jenis robot otomatis yang dapat dibuat oleh
siswa-siswi adalah robot line folower atau robot line tracer.
Robot line folower adalah robot yang berjalan mengikuti garis
hitam pada permukaan berwarna putih atau
garis putih pada permukaan berwarna hitam . Robot ini memerlukan sensor yang
terdiri dari pasangan LED dan photodioda.

Gambar 1. Robot Line Follower Beserta Lintasan
B. Konsep Pergerakan Robot Line Folower
Prinsip pergerakan robot line folower hanya ada tiga
gerakan sebagai berikut:
- bergerak lurus, kedua roda bergerak dan berputar maju,
- belok kanan, roda kanan berputar mundur dan roda kiri berputar maju,
- belok kiri, roda kiri berputar mundur dan roda kanan berputar maju.
Catat:
belok kanan dapat juga dilakukan dengan cara roda kanan diam dan roda kiri
berputar maju.

Gambar 2. Ilustrasi Pergerakan Robot Line Follower.
(Sumber : http://andyq3lectra.wordpress.com)
Posisi 2 : Sensor sebelah kiri berada
di luar jalur sehingga roda sebelah kanan mati, sementara roda kiri tetap
berputar. Akjibatnya robot akan berbelok ke kanan .
Posisi 3 : Kedua sensor tepat di atas jalur maka kedua sensor hidup sehingga
kedua roda berputar dan robot melaju lurus ke depan.
Robot Line folower
dilengkapi dengan dua buah sensor untuk mendeteksi jalur (track). Sensor sebelah kanan mengatur kerja roda sebelah kiri,
sebaliknya sensor sebelah kiri mengatur kerja roda sebelah kanan. Jika sensor
berada di luar jalur maka sensor akan mati, sebaliknya sensor berada di atas
jalur maka sensor akan hidup.
C. Bagian-Bagian Robot Line Follower
Robot Line folower
memiliki beberapa bagian antara lain sebagai berikut:
1.
Roda depan, dapat menggunakan roda yang biasa
dipakai pada mebeler.
2.
Rangkaian sensor, terdiri dari pasangan LED dan
Photodiode. Setiap robot sekurang-kurangnya memiliki dua pasang sensor.
3.
Driver motor, adalah rangkaian yang bertugas
mengatur bekerjanya motor.
Gambar 3. Bagian-bagian utama robot line folower
dengan tiga roda
4.
Motor penggerak, berfungsi untuk menggerakkan
roda belakang.
5.
Roda belakang.
6.
Rangka (bodi) robot, bisa dibuat dari triplek, akrilik,
plastik atau bahan-bahan lain yang ringan dan mudah dikerjakan.
Gambar 4. Robot ilne folower empat roda
D. Mekanik Robot Line Follower
Bagian mekanik adalah bagian yang
merupakan bodi dan penggerak robot line follower
yang meliputi Bodi, Roda, Gearbox, dan Motor DC.

Gambar 5. Contoh desain mekanik robot
E. Bodi
Bodi robot line follower
merupakan dudukan (tempat untuk meletakkan) semua komponen robot seperti
pengontrol, Gearbox dan Motor DC serta roda. Bodi robot line follower dapat
dibuat dari berbagai bahan seperti papan PCB (printed circuit board), triplek, plat
aluminium, akrilik atau mika. Bodi sebaiknya dipilih dari bahan yang ringan
namun cukup kuat.
Bentuk bodi line
follower disesuaikan dengan konstruksi komponen-komponen yang akan dipasang,
dibuat sesederhana dan seringan mungkin.
F. Roda
Roda yang
digunakan pada robot line follower dapat bermacam–macam jenis dan ukuran. Roda
robot dapat dibuat dari bahan yang mudah ditemukan seperti kayu, plastik, atau
karet. Yang penting roda harus dapat dipasang dengan kuat dan mudah pada motor
penggeraknya. Oleh karena itu paling mudah jika menggunakan roda buatan pabrik
seperti ditunjukkan pada gambar 3.
Robot Line Follower
dapat dikategorikan berdasarkan jumlah roda yang dimilikinya. Mulai dari robot dengan dua roda, tiga roda atau
empat roda. Namun yang umum digunakan adalah robot dengan tiga atau empat roda.
(a) macam-macam roda belakang

(b) macam-macam caster
Gambar 6 Macam-macam bentuk roda
robot
(Sumber : www.active-robots.com)
Robot tiga roda
memerlukan sebuah roda depan dari jenis roda caster yang berfungsi sebagai penyangga. Roda ini harus dapat
berputar bebas ke-kiri dan ke-kanan masing-masing 90°. Banyak jenis roda caster yang bisa digunakan, salah satunya
yang paling terkenal adalah dari pabrikan Tamiya. Namun, tak ada rotan akarpun
jadi – jika kita menginginkan yang lebih murah bahkan gratis, bekas roda
deodorant atau roda kursi tamu bisa dimanfaatkan sebagai roda
caster.
Robot empat roda
menggunakan roda depan dan roda belakang dari tipe yang sama. Biasanya roda
depan dan belakang dikopel sehingga berputar bersama-sama.
Setiap roda
belakang dihubungkan dengan sebuah motor. Hal ini penting agar, robot mampu berbelok ke kiri dan kekanan serta
mengatur rotasi putaran yang diinginkan. Pemilihan roda robot dapat
disesuaikan dengan keinginan pembuat. Baik dari diameter roda yang besar maupun dari segi bentuk roda.

Gambar 7. Contoh Bentuk Bodi Line Follower
G. Gearbox
Gearbox pada
robot line follower merupakan komponen yang berfungsi secara mekanis. Terdiri
dari kumpulan gear yang terletak dalam satu kotak tertutup dengan fungsi untuk
memanipulasi besar torsi dan kecepatan putaran motor penggerak. Macam-macam
bentuk dari gearbox dapat dilihat pada gambar 8.

Gambar 8. Macam-macam Gearbox
(Sumber : www.active-robots.com)

(a)
Motor DC (b) Motor DC gearbox
Gambar 9. Motor DC non-Gearbox
(Sumber : www.active-robots.com)
H. Motor DC
Motor DC merupakan komponen paling
penting dalam robot line follower. Motor DC berfungsi sebagai penggerak robot
line follower. Motor DC yang banyak berada di pasaran dapat dibagi menjadi 2
jenis, yakni motor DC non-Gearbox dan Motor DC Gearbox. Motor DC non-Gearbox
atau biasanya disebut Motor DC, misal motor tape recorder, motor Tamiya dll.
Moitor DC biasanya mempunyai putaran yang sangat tinggi sehingga sebagai
penggerak robot line follower putarannya harus diturunkan. Motor DC gearbox
merupakan motor DC yang telah dilengkapi dengan gearbox. Gambar 6, menunjukkan
motor DC dan motor DC-gearbox.


Gambar 10 Contoh cara sederhana mengikat motor DC pada bodi robot
I. Pengontrol Robot Line Follower
Bagian
pengontrol adalah bagian yang berfungsi untuk
mengontrol pergerakan robot. Pengontrol
robot line follower terdiri dari sensor, komparator, dan driver motor
seperti ditunjukkan pada Gambar 11.

Gambar 11. Contoh rancangan mekanik robot
Sensor
Sensor pada robot line follower berfungsi untuk mendeteksi
jalur yang harus diikuti oleh robot. Sensor pendeteksi jalur dibuat dari
pasangan LED dan photodiode atau phototransistor. LED berfungsi mengeluarkan
cahaya. Cahaya tersebut jika mengenai permukaan berwarna putih akan dipantulkan
dan diterima oleh photo-dioda, jika cahaya mengenai permukaan berwarna hitam
maka cahaya tersebut akan diserap oleh warna hitam (tidak dipantulkan kembali).

Gambar 12. Pasangan sensor pendeteksi jalur
Photodioda memiliki sifat jika
menerima cahaya maka resistensinya akan turun, Perhatikan gambar rangkaian
photo-diode berikut ini

Gambar 13. Skema rangkaian photo diode
Tegangan keluaran photodiode akan dikirim ke komparator,
besarnya tegangan tersebut dapat dihitung dengan persamaan
jika photo diode
mendapat cahaya è
resistnasinya (Rs) rendah è Vo
rendah
jika photo diode
tidak mendapat cahaya è
resistansinya tinggi è Vo
tinggi
Misalkan sensor memiliki
resistensi Rs = 150 KOhm (Pada permukaan hitam, tidak ada pantulan cahaya) dan
Rs = 10 KOhm (pada permukaan putih, ada pantulan cahaya) tegangan yang
dikeluarkan akan dikirim ke komparator dengan perhitungan seperti di bawah ini
:

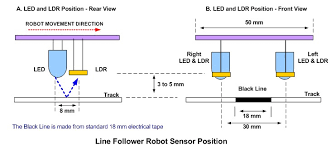
Penempatan
sensor yang ideal untuk robot line follower dengan dua pasang sensor adalah tepat
di luar garis yang akan dijadikan track lintasan. Jarak antar sensor juga harus
disesaikan dengan lebar garis yang akan digunakan.

Gambar 14. Posisi peletakan sensor

Gambar 15. Contoh sensor proximity
Komparator
Komparator adalah rangkaian elektronika
yang berfungsi membandingkan 2 input tegangan. Contoh IC komparator adalah
LM39. Komparator bisa juga dibuat dari IC Opamp, misalnya LM324 atau LM741.
Rangkaian dasar komparator ditunjukkan pada gambar 16.

Gambar 16. Rangkaian dasar komparator
Komparator mempunyai dua buah
input dan sebuah output. Input non-inverting dihubungkan ke tegangan referensi
yakni sebuah potensiometer, berguna untuk mengatur kepekaan komparator. Input
inverting dihubungkan rangkaian sensor seperti ditunjukkan pada gambar 17.
Output komparator dihubungkan ke driver motor.

Gambar 17. Rangkaian Sensor dan Komparator
Karakteristik dari komparator adalah sebagai berikut :
·
Jika tegangan input Inverting lebih tinggi dari
Input noninverting maka Vo = 0
·
Jika tegangan input Inverting kurang dari Input noninverting maka Vo = Vcc
·
beberapa contoh seperti pada gambar 18.

Gambar 18. Hubungan input-output komparator
Driver Motor
Driver motor adalah bagian dari
robot line follower yang berfungsi sebagai penggerak atau pemberi daya listrik
ke motor DC. Komponen utama dari driver adalah sebuah transistor-daya yang
difungsikan sebagai sakelar (sakelar elektronik).

Gambar 19. Rangkaian lengkap robot line follower
Berikut akan dibahas driver motor
DC untuk mengontrol motor dapat berputar maju dan mundur. Motor yang dikontrol
adalah motor DC 9 Volt, yakni motor bekas pemutar CD-ROM. Transistor-daya
yang dipakai adalah tipe 9013 dengan kapasitas arus maksimum 0,5 Amper, atau
BD139 dengan kapasitas arus 1,5 Amper. Gambar rangkaian Robot Line Follower
ditunjukkan pada gambar 18.
Daftar Komponen Line Follower Analog
n Resistor 1 kΩ (2 buah)
n Resistor 560 Ω (5 buah)
n Resistor
33kΩ (1 buah)
n Multiturn
50kΩ (1 buah)
n Led Indikator (2 buah)
n Led Superbright warna merah (1 buah)
n Photodiode (1 buah)
n Transistor BD139 atau 9013 (4 buah)
n OpAmp LM324 + Soket IC (1 buah)
n Kapasitor Elektrolit/Elco (1 buah)
n Kapasitor milar 104 (2 buah)
n Dip Plug 2 pin (3 buah)
n Dip Plug 4 pin (2
buah)
n Kabel 6 pin/ kabel pelangi 10 pin (½ meter)
Langkah-langkah pembuatan mekanik
robot line follower:
1. Tentukan
semua komponen yang akan digunakan,
2.
Ukur
dimensi dari masing-masing
komponen robot yang akan
dipasang pada bodi,
3.
Rancang tata letak semua komponen dengan memperhatikan
ukuran masing-masing, kemudian gambar bentuk dan ukuran bodi yang diperlukan,
4.
Potong
bodi sesuai ukuran yang telah ditentukan,
5.
Pasang
gearbox pada motor DC,
6.
Pasang
roda belakang pada poros gearbox,
7.
Pasang roda depan,
8.
Pasang
driver, sensor dan bateray,
9. Periksa
kembali apakah semua komponen sudah terpasang dengan sempurna.
Line Follower
latihan diambil dari tutorial plpg elektronika UM 2012
latihan diambil dari tutorial plpg elektronika UM 2012
wah makasih banget..
BalasHapusklu kita mo pesan komponen dimana yach, pengen coba juga tx
BalasHapusmakasih banget :)
BalasHapusKak kalau gax pake driver bsa gax Dan apa pengaruhnya? Mau tanya
BalasHapus